> For the complete documentation index, see [llms.txt](https://docs.arkelectron.com/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://docs.arkelectron.com/products/sensor/ark-flow-mr/px4-instructions.md).
# PX4 Instructions
### Hardware Setup
#### Wiring
The ARK Flow MR is connected to the CAN bus using a Pixhawk standard 4 pin JST GH cable. For more information, refer to the [CAN Wiring](https://docs.px4.io/main/en/can/#wiring) instructions.
#### Mounting
The recommended mounting orientation is with the connectors on the board pointing towards **back of vehicle**, as shown in the following picture.
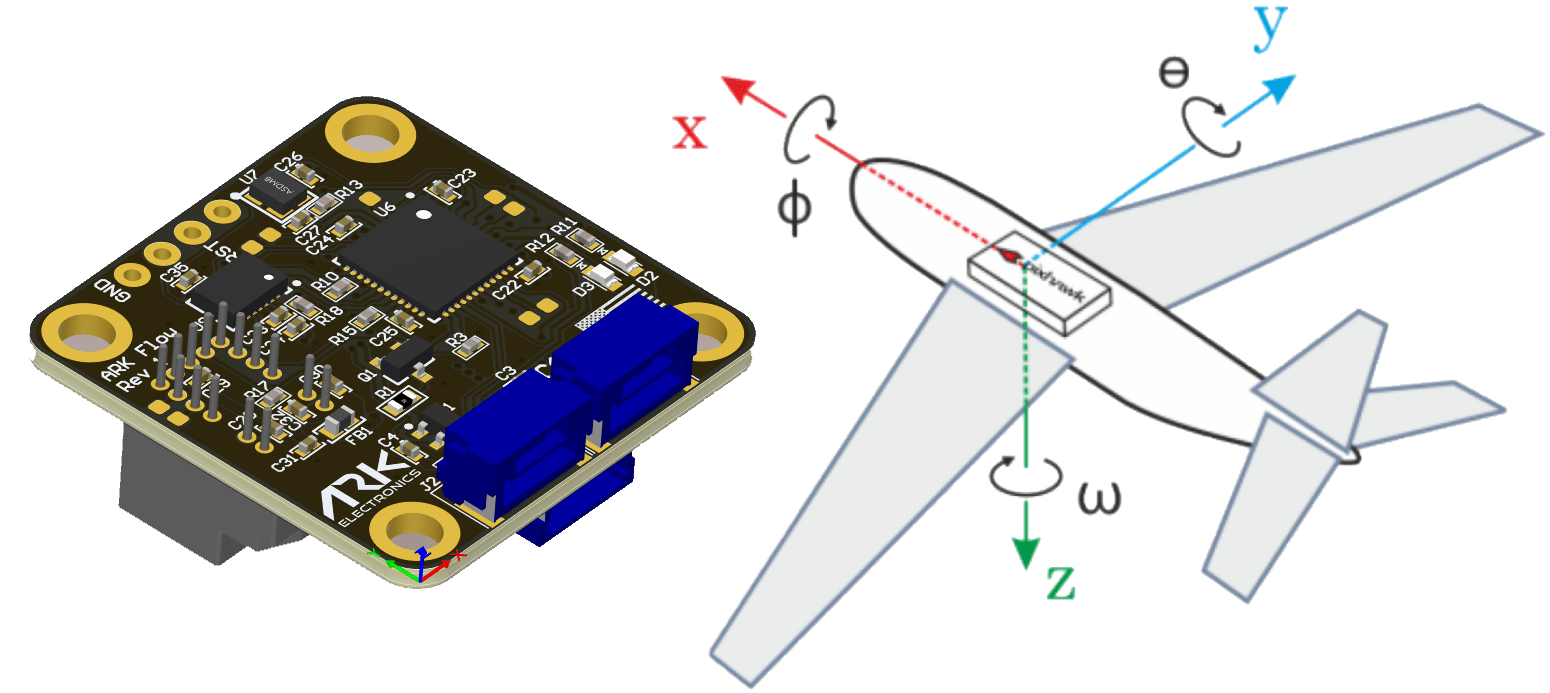
This corresponds to the default value (`0`) of the parameter [SENS\_FLOW\_ROT](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#SENS_FLOW_ROT). Change the parameter appropriately if using a different orientation.
The sensor can be mounted anywhere on the frame, but you will need to specify the focal point position, relative to vehicle center of gravity, during [PX4 configuration](https://docs.px4.io/main/en/dronecan/ark_flow.html#px4-configuration).
### Firmware Setup
ARK Flow MR runs the [PX4 DroneCAN Firmware](https://docs.px4.io/main/en/dronecan/px4_cannode_fw.html). As such, it supports firmware update over the CAN bus and [dynamic node allocation](https://docs.px4.io/main/en/dronecan/#node-id-allocation).
### Flight Controller Setup
{% hint style="info" %}
The ARK Flow MR will not boot if there is no SD card in the flight controller when powered on.
{% endhint %}
Connect the ARK Flow MR CAN to the flight controller's CAN port. Once parameters are set the module will be detected on boot. See [DroneCAN > Enabling DroneCAN](https://docs.px4.io/main/en/dronecan/#enabling-dronecan) for more detail.
### Flight Controller Parameters
Set the following in *QGroundControl* and reboot the flight controller.
#### Required
| Parameter | Value | Description |
| ----------------------------------------------------------------------------------------------------------- | ----- | ------------------------------------------------------------------------------------ |
| [UAVCAN\_ENABLE](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#UAVCAN_ENABLE) | 2 | Enable DroneCAN with dynamic node allocation (use `3` if also driving DroneCAN ESCs) |
| [UAVCAN\_SUB\_FLOW](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#UAVCAN_SUB_FLOW) | 1 | Subscribe to DroneCAN optical flow messages |
| [UAVCAN\_SUB\_RNG](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#UAVCAN_SUB_RNG) | 1 | Subscribe to DroneCAN range finder messages |
| [EKF2\_OF\_CTRL](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#EKF2_OF_CTRL) | 1 | Enable optical flow fusion in the EKF |
| [EKF2\_RNG\_A\_HMAX](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#EKF2_RNG_A_HMAX) | 10 | Max range used by the EKF |
| [EKF2\_RNG\_QLTY\_T](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#EKF2_RNG_QLTY_T) | 0.2 | Range finder quality time |
| [UAVCAN\_RNG\_MIN](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#UAVCAN_RNG_MIN) | 0.08 | Min reported range |
| [UAVCAN\_RNG\_MAX](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#UAVCAN_RNG_MAX) | 50 | Max reported range |
| [SENS\_FLOW\_MINHGT](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#SENS_FLOW_MINHGT) | 0.08 | Min height for optical flow fusion |
| [SENS\_FLOW\_MAXHGT](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#SENS_FLOW_MAXHGT) | 25 | Max height for optical flow fusion |
| [SENS\_FLOW\_MAXR](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#SENS_FLOW_MAXR) | 7.4 | Max angular flow rate (PAW3902 limit) |
#### Optional
| Parameter | Description |
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ | ------------------------------------------------------------------------------------------------------------------- |
| [UAVCAN\_SUB\_IMU](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#UAVCAN_SUB_IMU) | Set to `1` to subscribe to DroneCAN `RawIMU` messages. Requires `CANNODE_PUB_IMU` to also be set on the ARK Flow MR |
| [EKF2\_GPS\_CTRL](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#EKF2_GPS_CTRL) | Set to `0` to disable GPS aiding (e.g. indoor flight) |
| [EKF2\_OF\_POS\_X](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#EKF2_OF_POS_X) / [EKF2\_OF\_POS\_Y](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#EKF2_OF_POS_Y) / [EKF2\_OF\_POS\_Z](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#EKF2_OF_POS_Z) | ARK Flow MR offset from the vehicle center of gravity (meters) |
| [SENS\_FLOW\_ROT](https://docs.px4.io/main/en/advanced_config/parameter_reference.html#SENS_FLOW_ROT) | Sensor rotation if mounted in a non-default orientation (default `0`) |
### CAN Node Parameters
Set the following on the sensor and reboot the node. CAN node parameters can be configured using either:
* [QGroundControl](https://docs.px4.io/main/en/dronecan/#qgc-cannode-parameter-configuration) — each CAN node appears as a separate *Component X* entry under **Vehicle Settings > Parameters**.
* The [DroneCAN GUI Tool](/knowledge-base/knowledge-base/dronecan-gui-tool-guide.md).
#### Optional
| Parameter | Description |
| ----------------- | ------------------------------------------------------------------------------------------------------------------------- |
| `CANNODE_TERM` | Set to `1` if this is the last node on the CAN bus |
| `CANNODE_PUB_IMU` | Set to `1` to publish `RawIMU` messages on the CAN bus. Requires `UAVCAN_SUB_IMU` to also be set on the flight controller |
---
# Agent Instructions
This documentation is published with GitBook. GitBook is the documentation platform designed so that both humans and AI agents can read, navigate, and reason over technical content effectively. Learn more at gitbook.com.
## Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://docs.arkelectron.com/products/sensor/ark-flow-mr/px4-instructions.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.